科技赋能、聚力奋进、乘风破浪、再创辉煌 传统码头的集装箱装卸作业通常采用人工对位的方式,存在精度差、效率低等问题。随着智慧港口的不断发展,集装箱的装卸作业已实现自动化,由人工智能代替传统对位方式大幅提升装卸作业效率。 在上级集团的指导下,海睿未来全面贯彻落实“科技兴安”三年专项活动文件要求,自主研发ICPS智能集卡定位系统——通过模型检测,定位集卡和集装箱等关键信息,结合高清工业屏和语音播报装置,引导集卡司机停在准确作业位置。 海睿未来智能集卡定位系统 系统亮点 支持陆侧自动化作业 与传统方案依靠预知位引导小车的方式不同,海睿未来AI方案检测海陆侧坐标,引导小车走到精准位置,并根据系统检测到的车辆定位、偏移角度、双箱间距等精确数值,提前把吊具的中锁间距、角度和倾角调整到位,实现精准抓箱。 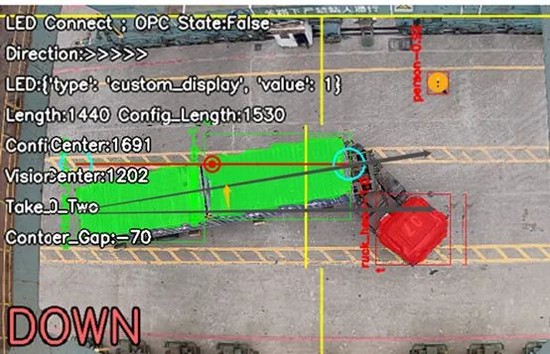
支持对场桥外拖进行引导 传统激光方案难以在场桥对外拖进行引导,云台激光完成车架覆盖需要3到5秒,而视觉方案通过二维的方式,约40毫秒即可实现整辆车的定位和锁孔的识别。 
支持无人集卡/IGV/AGV引导 依靠IGV自身的激光和slam(即时定位与地图构建)很难对准,实测过程中存在约20厘米左右的差值,通过系统引导可以实现IGV精准定位。以两年前在天津港落地的项目为例,无人拖头到了岸桥底下就由系统接管,系统可根据定位精准引导拖车对位,同时输出识别到的精确测量数值,吊具根据识别数值进行抓箱、放箱。 支持多车道同时引导 一台普通相机,即可实现对多车道的同时引导,支持双箱吊、四箱吊、边装边卸工艺,实现双循环作业模式。 支持双箱箱缝距离检测、高低箱判断 一些较大的码头经常有双20尺箱、也有高低箱,做自动化或远控时,如果不能判定高低箱情况,吊具磕到高箱就会造成设备损坏。海睿未来智能集卡定位系统既能检测双箱箱缝间距、也能判断是否有高低箱的情况。 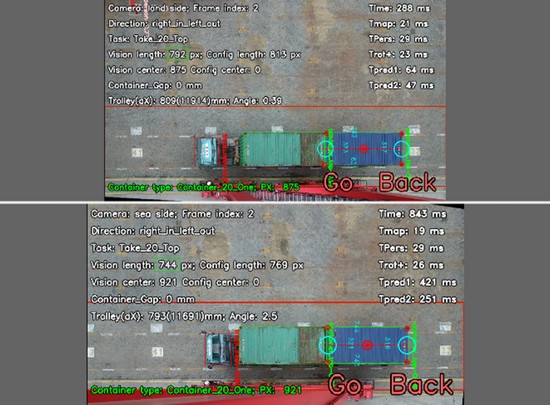
支持拖车二次引导 由于场地的基建高低不平,车辆的胎压也会影响水平情况,传统方式依赖大车和集卡司机的默契进行调整。海睿未来智能集卡定位系统,实时检测货箱与吊具的实际偏差,并将检测值反馈给大车司机,进行拖车调整的二次引导。 支持关路作业安全检测 作业区域规划厘米级精确的安全电子围栏,实现人员闯入告警、车头防砸保护、声光报警等功能,介入设备控制联锁,保障作业安全。 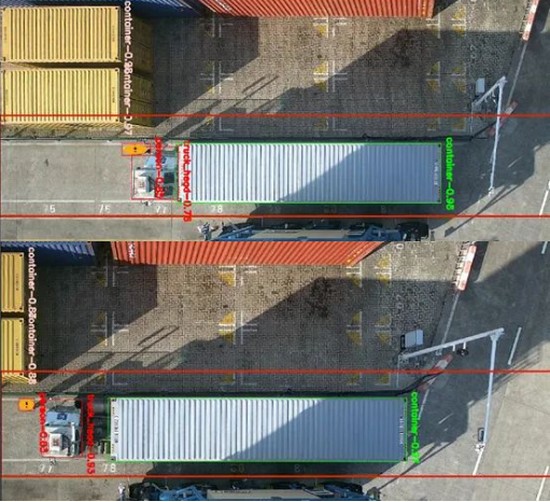
极端环境的可靠性 系统有先进的去雾、去雨的算法,在大雾、大雨、大雪等能见度较低的天气,南方码头是已经停止作业,而在北方有些码头还要正常作业。在这种能见度较低的环境下,系统依旧可以很可靠、高精度地进行定位和引导。 
低建设及维护成本 相比传统激光群方案,海睿未来视觉方案的建设成本下降50%以上、硬件维护成本下降90%以上,任何品牌的普通相机即可实现系统功能。 来源:活力厦门港
|